#include "entity.h" Include dependency graph for dumb_physics.h:
Include dependency graph for dumb_physics.h: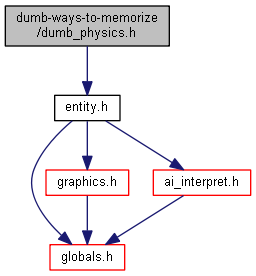 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: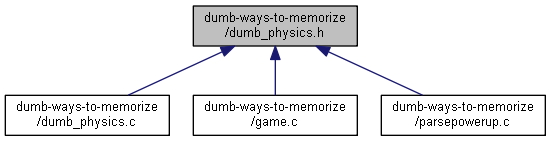
Go to the source code of this file.
Enumerations | |
| enum | physics_laws_t { PHYSICS_NULL = 0, PHYSICS_BASE_FRICTION = 1, PHYSICS_BASE_SPEED_X = 5, PHYSICS_BASE_SPEED_Y = 10, PHYSICS_MAX_SPEED = 16, PHYSICS_MAX } |
Functions | |
| void | RunPhysics () |
| int | CheckCollision (entity_t *self, entity_t *other) |
| void | DoCollision (entity_t *self, entity_t *other) |
| void | ApplySpeedLimit (vec2_t *a) |
| void | ApplyBounds (entity_t *ent) |
| void | ApplyFriction (vec2_t *a) |
Enumeration Type Documentation
| enum physics_laws_t |
Defines the Preset Physics values
Definition at line 7 of file dumb_physics.h.
Function Documentation
| void ApplyBounds | ( | entity_t * | ent | ) |
Applies the bounds to specified ent, defined by the screen dimensions.
- Parameters
-
[in,out] ent If non-null, the ent.
- Date
- 3/29/2016
Definition at line 168 of file dumb_physics.c.
References gScreenHeight, gScreenWidth, and PHYSICS_MAX_SPEED.
Referenced by RunPhysics().
| void ApplyFriction | ( | vec2_t * | a | ) |
Applies the friction to vector a, for the nonzero values. Uses Physics_base_friction for friction coefficient.
- Parameters
-
[in,out] a If non-null, the vec2_t to process.
- Date
- 3/29/2016
Definition at line 194 of file dumb_physics.c.
References PHYSICS_BASE_FRICTION, vec2_t::x, and vec2_t::y.
Referenced by RunPhysics().
| void ApplySpeedLimit | ( | vec2_t * | a | ) |
Applies the speed limit to vector a, defined by physics max speed.
- Parameters
-
[in,out] a If non-null, the vec2_t to process.
- Date
- 3/29/2016
Definition at line 162 of file dumb_physics.c.
References PHYSICS_MAX_SPEED, vec2_t::x, and vec2_t::y.
Referenced by RunPhysics().
| int CheckCollision | ( | entity_t * | self, |
| entity_t * | other | ||
| ) |
Check collision between entities. (AABB)
- Parameters
-
[in,out] self If non-null, the class instance that this method operates on. [in,out] other If non-null, the other.
- Returns
- An int 1 if colliding, 0 if not.
- Date
- 3/20/2016
Definition at line 57 of file dumb_physics.c.
References COLLISION_TYPE_CLIP.
Referenced by RunPhysics().
| void DoCollision | ( | entity_t * | self, |
| entity_t * | other | ||
| ) |
Executes the collision operation. Place self farthest x or y away from other, vice versa. And negative the velocity to half of orginal collision vel, for bounce back.
- Parameters
-
[in,out] self If non-null, the class instance that this method operates on. [in,out] other If non-null, the other.
- Date
- 3/20/2016
Definition at line 75 of file dumb_physics.c.
References COLLISION_TYPE_RAGDOLL, Vec2Add(), vec2_t::x, and vec2_t::y.
Referenced by RunPhysics().
| void RunPhysics | ( | ) |
Executes physics. RunTime O( n(n+1)/2 ) Applies velocity, acceleration, gravity, and friction. Limits velocity, acceleration, and sets bounds.
- Date
- 3/20/2016
Definition at line 9 of file dumb_physics.c.
References ApplyBounds(), ApplyFriction(), ApplySpeedLimit(), CheckCollision(), COLLISION_TYPE_STATIC, DoCollision(), gEntities, MAX_ENTITIES, PHYSICS_LIMITER, Vec2Add(), and vec2_t::y.
Referenced by UpdatePlaying().
